Matthieu Zins
Computer Vision engineer (PhD)
Inria Nancy - Grand Est
About me
I am a PhD student in the Tangram team (previously Magrit) at Inria in Nancy. I am supervised by Marie-Odile Berger and Gilles Simon. My general areas of interest are computer vision, machine learning and augmented reality. My research focuses on improving visual localization using abstract object models.
Before starting my PhD, I have worked for 2 years at Kitware, as a computer vision engineer. I wrote my Master Thesis at SICK IVP, supervised by Ola Friman, on Super-resolution for Time-of-flight Cameras. I received a French Engineering degree from the UTC and a MSc from Linköping University, Sweden, both in Computer Science. I have also spent 6 months as an exchange student at Technische Universität Chemnitz in Germany.
News
- [Apr 9, 2023] OA-SLAM has been accepted as demo at CVPR 2023.
- [Dec 9, 2022] I successfully defended my thesis: Contributions to the accuracy and robustness of visual localization in a world of objects.
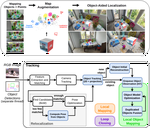
- [Aug 16, 2022] Accepted paper: OA-SLAM: Leveraging Objects for Camera Relocalization in Visual SLAM has been accepted to ISMAR 2022.
- [Jun 30, 2022] Accepted paper: Level Set-Based Camera Pose Estimation From Multiple 2D/3D Ellipse-Ellipsoid Correspondences has been accepted to IROS 2022.
- [Feb 1, 2022] Accepted paper: Object-Based Visual Camera Pose Estimation From Ellipsoidal Model and 3D-Aware Ellipse Prediction has been accepted to IJCV.
- [Oct 2, 2020] Accepted paper: 3D-Aware Ellipse Prediction for Object-Based Camera Pose Estimation has been accepted to 3DV 2020.
- [Jun 17, 2019] Best paper Award: Urban Semantic 3D Reconstruction from Multiview Satellite Imagery at CVPR 2019 (EarthVision Workshop).
Interests
- Computer Vision
- Augmented Reality
- Deep Learning
- Algorithms
Education
-
PhD in Computer Vision, 2022
Inria
-
MSc in Computer Science, 2017
Linköping University
-
Engineer degree in Computer Science, 2017
Université de Technologie de Compiègne